Model-Based Quadrotor
Full model-based with quadrotor, faulted rotor and Fault free rotor, experiments and more information can be found in github repository.
I am a peruvian master's student of computer science at San Pablo Catholic University (UCSP), Arequipa.
I am Interested in Deep Learning Research, especially feel enthusiastic about research in Deep Reinforcement Learning and Robotics. Currently, I am currently working as part of my master's thesis, about whether a quadrotor can learn a policy that allows it to fly and that is robust to the total loss of a rotor.
Full model-based with quadrotor, faulted rotor and Fault free rotor, experiments and more information can be found in github repository.
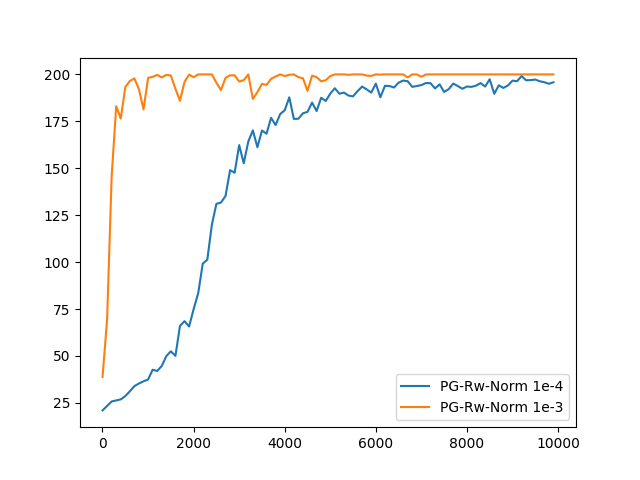
In progress work, implementation of various of reinforcement-learning algorithms.
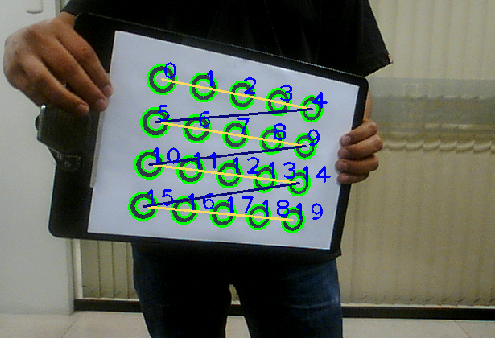
The purpose of this work is to get the intrinsic parameters of a camera using an modified iterative method proposed by Ankur et. al.
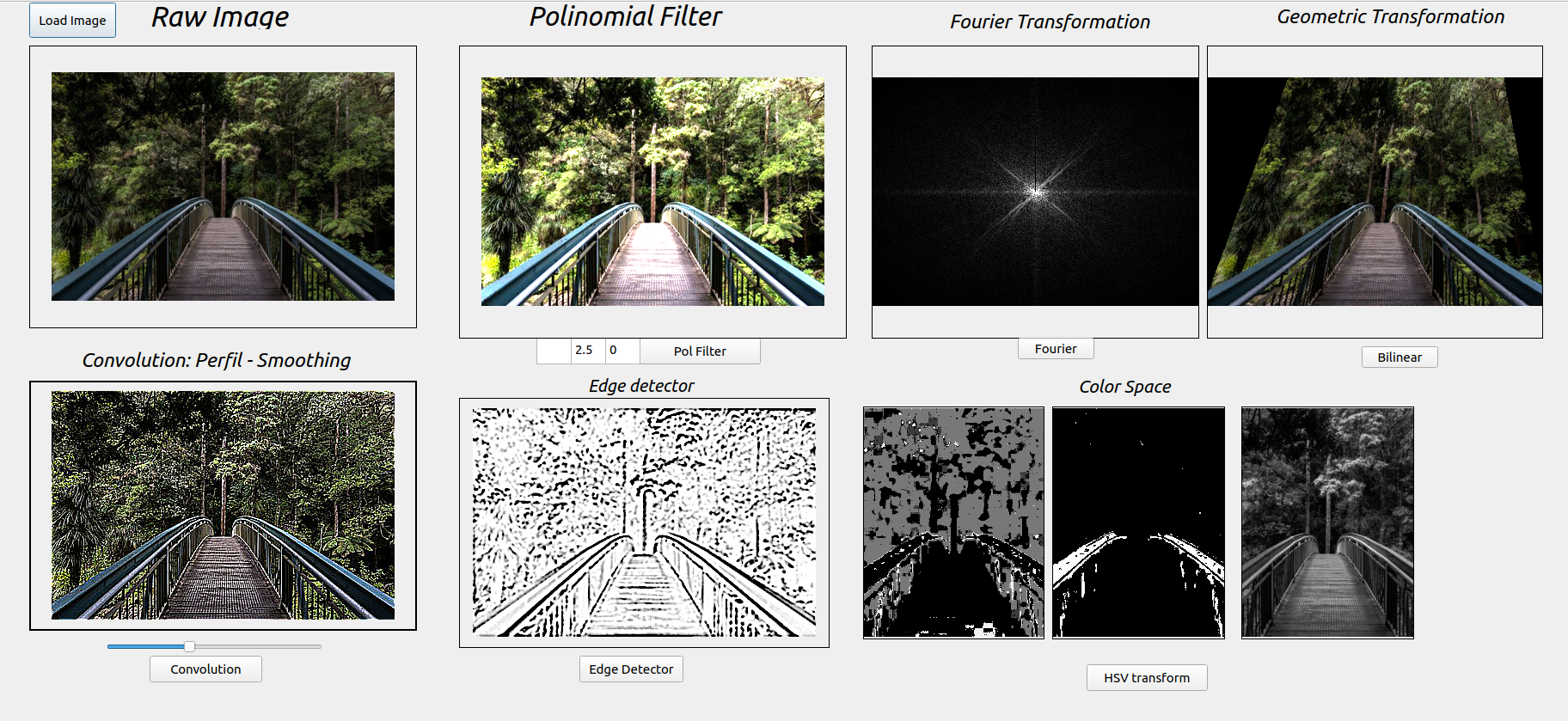
Simple image-processing application in QT, Cuda&C++, operation such convolutions, polinomial filters, fourier transform, etc.